ENPIRE: Agentic Robot PolicySelf-Improvement in the Real World
Abstract
Achieving dexterous robotic manipulation in the real world relies heavily on human supervision and algorithmic engineering, which is a central bottleneck in the pursuit of general physical intelligence. Although emerging coding agents can generate code to automate algorithm search, their successes remain largely confined to digital environments. We conjecture that the missing abstraction to automate robotics research is a repeatable feedback loop for real-world policy improvement: reset the scene, execute a policy, verify the outcome, and refine the next iteration.
To bridge this gap, we introduce ENPIRE, a harness framework for coding agents that instantiates this physical feedback routine with four core modules: an Environment module (EN) for automatic reset and verification, a Policy Improvement module (PI) that launches policy refinement, a Rollout module (R) to evaluate policies with single or multiple physical robots operating in parallel, and an Evolution module (E) in which coding agents analyze logs, consult literature, improve training infrastructure and algorithm code to address failure modes.
This closed-loop system transforms real-world robot learning into a controllable optimization procedure that agents can manage, thus minimizing human effort while allowing fair ablations across training recipes and agent variants. Powered by ENPIRE, frontier coding agents can autonomously develop a policy to achieve a 99% success rate on challenging, dexterous manipulation tasks in the real world, such as PushT, organizing pins into a pin box, and using a cutter to cut a zip tie.
Coding agents can improve policies with various PI regimes, such as heuristic learning, tool calling, behavior cloning, offline or online RL. Moreover, ENPIRE can be significantly accelerated on a robot fleet, and we propose two metrics, namely, Mean Robot Utilization (MRU) and Mean Token Utilization (MTU) to measure the efficiency of multiagent physical autoresearch. We also include simulation results in RoboCasa. Our findings suggest a practical and scalable path toward autonomously advancing robotics in the real world.
Learned Manipulation Policy
Policies trained with ENPIRE reach a 99% pass@8 success rate across the showcased manipulation tasks.
Push T
Pin Insertion
GPU Insertion
Tie Ziptie
Cut Ziptie
ENPIRE runs fully autonomously on real robots. Working only through the automated reset and verification interface, a team of coding agents proposes algorithmic hypotheses (heuristic learning, behavior cloning, offline and online RL), tests them against the real-world success rate, and keeps the changes that move it. The idea tree below traces that search as a hypothesis git-tree — one branch per agent, one node per idea tried — plotted on the same wall-clock-time axis as the success-rate curve, so you can see the ideas that moved the curve upward.
Figure 1: Each coding agent explores its own branch of ideas, one lane per branch. Every dot is an idea it tried; a green ring marks an idea that raised the team’s average success rate, and green curves trace cross-agent inspiration. The lower panel tracks the team’s average success rate climbing over research wall-clock time.
ENPIRE System

 ENPIREEnvironment
ENPIREEnvironment


From Robot Hardware to an Agent-Operable Environment
Before an agent can improve a robot policy, the task must become self-resetting and self-verifying. Two capabilities make this possible: automatic evaluation, which scores the outcome of each trial without human judgment, and automatic reset, which returns the scene to a fresh initial state for the next trial.
Auto Evaluation
We use an autoresearch-derived reward function to automatically score the outcome of zip-tie insertion: a detector draws bounding boxes around the zip-tie head and strap, a segmentation model resolves the same parts into masks over the raw view, and each camera view independently judges whether the zip-tie strap passes through the head above a fixed length threshold. The per-camera verdicts are then fused into the final binary reward.
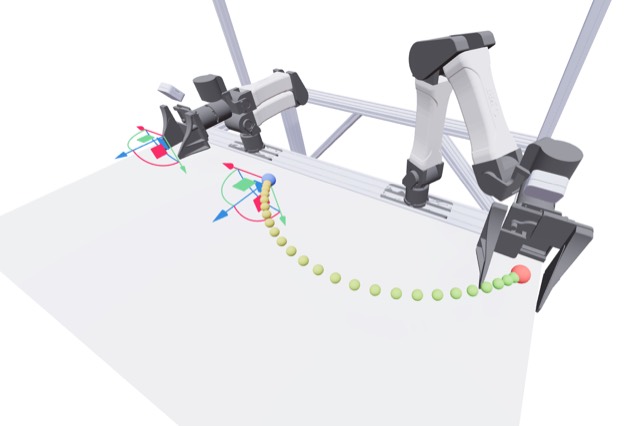
Auto Reset
The reset panels below show the physical loop that makes repeated experiments possible: select a randomized initial state, run the reset behavior, and verify that the trial is ready for the next policy.
- Automatic reset returns each task to a known randomized initial state without manual intervention.
- Automatic verification records whether the reset succeeded and exposes representative frames for inspection.
Agents Improve Policies From Physical Feedback
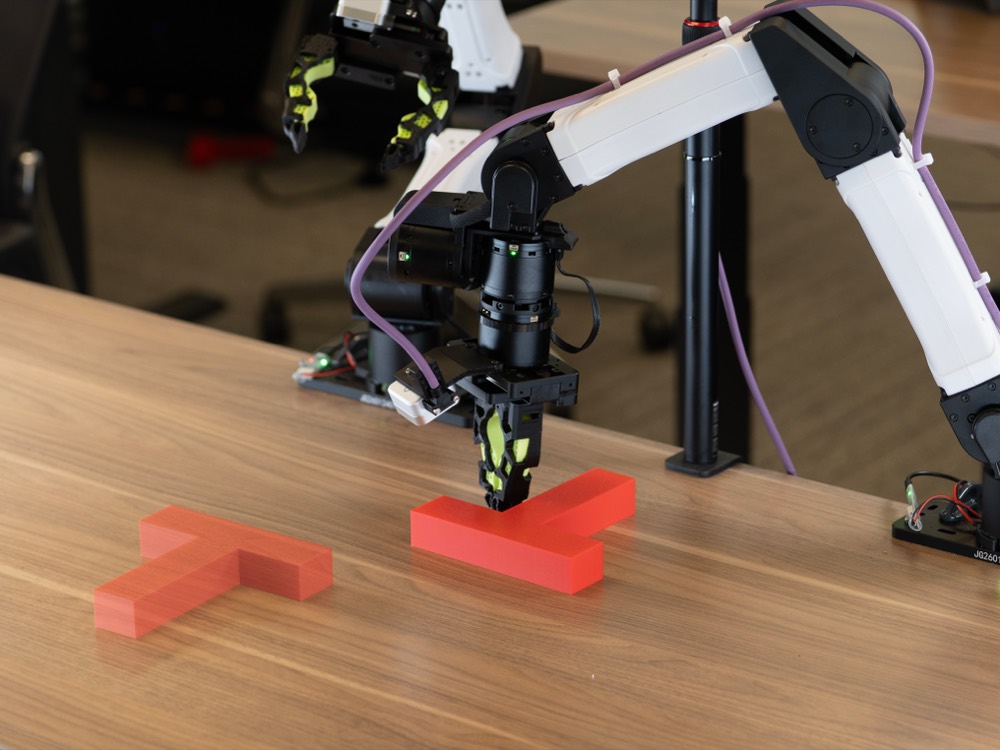
Once the environment is operable, agents edit policy code, run trials, inspect failures, and decide what to change next. The Push-T panel visualizes actual rollout traces from multiple code agents under the same six initial states so the behavior is inspectable, not just summarized by a success rate.
Evaluate Coding Agent
We evaluate the physical autoresearch capability of three coding agents: Codex with GPT-5.5, Claude Code with Opus 4.7, and Kimi Code with Kimi K2.6. Instead of asking only whether a final policy succeeds, AutoEnvBench tracks agent-driven research progress over wall-clock time across Push-T and Pin Insertion.
Push-T (Heuristic Learning)
Push-T model comparison
Pin Insertion (Gradient-based Learning)
Pin Insertion model comparison
Scaling Autoresearch on Robot Fleets
Scaling the number of agents changes both research progress and hardware pressure. The scaling-law plots compare one-, four-, and eight-agent teams on Push-T and Pin Insertion, while the resource utilization figure shows robot utilization, GPU utilization, token throughput, and the time required to reach task success.
Push-T Scaling
Push-T team scaling
Pin Insertion Scaling
Pin Insertion team scaling
Evaluation in Simulation
We also evaluate ENPIRE in simulation to separate agent-driven research behavior from real-world hardware throughput. Simulation tasks let agents run denser ablations, compare policy-improvement regimes under controlled resets, and test whether recipes discovered in the physical loop transfer to broader manipulation settings.
Limitations & Future Directions
Coding agents do not fully utilize robot resources when they are reading logs, writing code, debugging, or waiting for the language-model backbone. As the number of robots scales, MRU decreases while GPU active utilization increases. Compared to a single-robot setup, agent teams spend more time summarizing peer branches and less time operating the robot, and coding agents may fail to launch enough parallel training sessions to exhaust GPU resources.
Scaling the robot fleet drives higher token consumption: as more agents read logs, summarize peer branches, and coordinate, the total token budget required to reach a successful policy grows with fleet size. Larger fleets can reach success sooner, but the additional speedup comes at the cost of higher token consumption.
Acknowledgements
We are grateful to many colleagues whose help made this project possible. We thank Jason Liu, Tony Tao, Tairan He, Alex Lin, Jim Yang, Paul Zhou, and Abhi Maddukuri for insightful discussions and feedback; Yide Shentu, Bike Zhang, Angchen Xie, Dvij Kalaria, and Yuqi Xie for their support with the experiments; Lion Park, Matin Furutan, Jeremy Chimienti, Dennis Da, and Tri Cao for fleet operation; and Tri Cao for the demo shots. We also thank the NVIDIA GEAR Team and the CMU LeCAR Lab for their continuous support.