 Spatial Intelligence Lab
Hi-Fi Physics Team
NVIDIA Warp Team
Spatial Intelligence Lab
Hi-Fi Physics Team
NVIDIA Warp Team
We present a novel formulation for mesh-free, reduced-order simulation of deformable hyperelastic objects. Existing work in reduced-order elastodynamic simulation represents the input geometry by either meshes, which can be difficult to obtain due to challenges in scanning and triangulating complex shapes, or by neural fields that require per-shape optimization. We propose to adopt a Reproducing Kernel Particle Method (RKPM) representation, which enables the construction of reduced-order skinning weights by solving a generalized eigensystem on the Hessian matrix of the elastic energy. We demonstrate that this formulation not only leads to a 40x training speedup compared with the per-shape optimization of neural fields, but also achieves lower simulation error when evaluated against the converged results of finite element method. We show our simulation results on a wide variety of objects in different representations including meshes and Gaussian splats, as well as the application of our method in the downstream task of robot simulation.
Traditional FEM-based simulation requires volumetric meshing, which is a challenging problem on arbitrary shapes by itself, and requires comprise between speed and accuracy. Furthermore, it may not even be well-defined for modern, imprecise point-based representations such as 3D Gaussian Splats. This motivates us to explore mesh-free simulation.
Moreover, we are interested in reduced-order simulation for its computational efficiency, where the simulation is performed on a subspace of basis functions (see the skinning eigenmodes in the figure below) instead of the full degrees of freedom (e.g. every particle in the object).
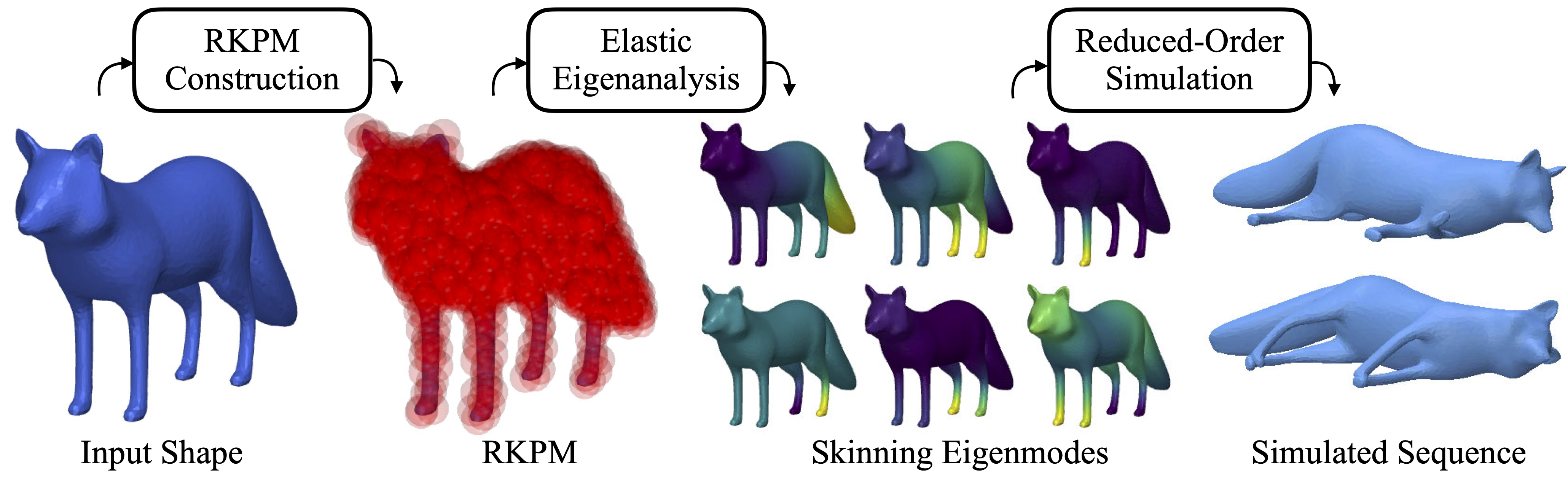
FreeForm offers a novel approach for mesh-free reduced-order simulation of deformable, hyperelastic objects. It uses the Reproducing Kernel Particle Method (RKPM) to discretize the object's geometry and parameterize the deformation subspace. Instead of relying on time-consuming per-shape optimization of neural fields like in Simplicits, FreeForm efficiently derives a set of optimal skinning eigenmodes by solving a generalized eigensystem on the Hessian matrix of the elastic energy using highly efficient linear algebra routines. This allows for the construction of high-quality, reduced-order bases (skinning weights) in a significantly faster training stage. Once the skinning weights are determined, they are used in a reduced-order elastic simulation stage to perform time stepping. For more details, please refer to the paper.
Our method achieves a significant speedup in finding optimal skinning eigenmodes compared to Simplicits,, the only other method offering reduced-order, mesh-free hyperelastic simulation for arbitrary objects. Moreover, our skinning weights lead to more accurate simulation results shown on the right side of the table. Please see videos below for more details.
| Dataset | Method | Training time (s) | Fix Side (↓) | Pull Farthest (↓) | Pull Boundary (↓) |
|---|---|---|---|---|---|
| Thingi10K | Simplicit | 121.44 ± 10.15 | 8.97e-03 | 5.58e-02 | 3.37e-02 |
| RKPM | 3.19 ± 2.48 | 6.87e-03 | 3.75e-02 | 3.11e-02 | |
| Simready | Simplicit | 117.45 ± 1.13 | 2.16e-09 | 9.38e-04 | 8.83e-04 |
| RKPM | 3.49 ± 2.39 | 1.01e-09 | 4.75e-04 | 4.16e-04 | |










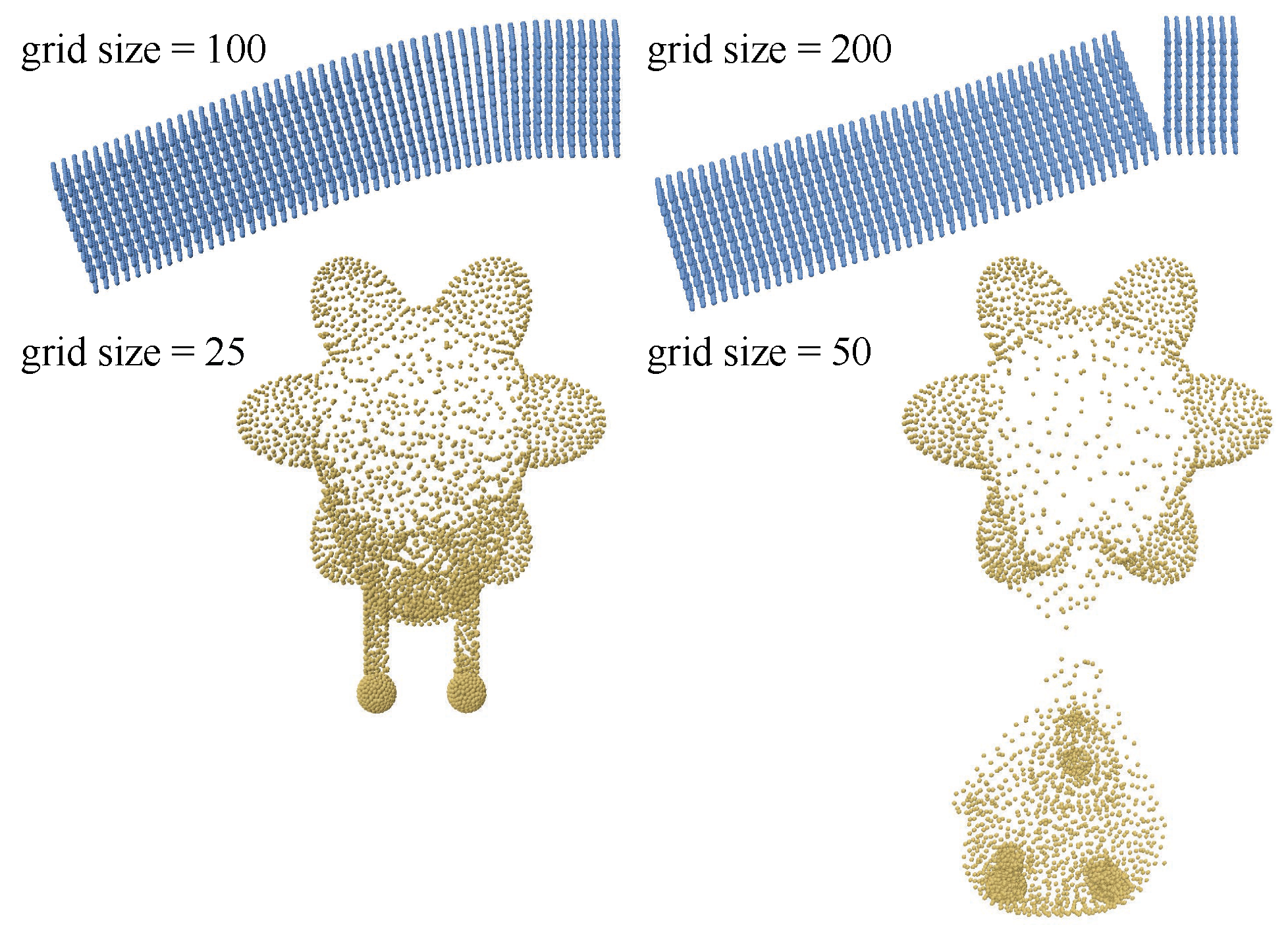
We compare our method with other mesh-free methods in reference to the gold standard Finite Element Method (FEM) results in the standard beam bending and twisting tests. Our method method consistently outperforms the Simplicits baseline, and also full-order MPM and SPH simulation given enough Degrees of Freedom (DOF).
We compare our method with Simplicits on shapes from the Thingi10K dataset under three types of boundary conditions (visualized by yellow points in the videos). Our method shows more accurate and expressive deformations than Simplicits.
We thank Sangeetha Grama Srinivasan for helping us with comparisons to SPH. We thank Miles Macklin, Eric Shi, Lukasz Wawrzyniak and others from the Warp team for assistance with the Warp platform. We thank Masha Shugrina, Clement Fuji Tsang, Or Perel and others for helping us with Kaolin and rendering 3DGS with 3DGRUT.