A Variable Shape and Variable Stiffness Controller for Haptic Virtual Interactions
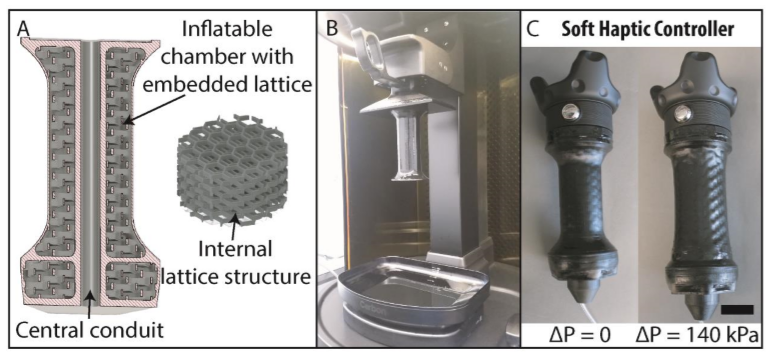
This paper presents an entirely compliant controller handle for use in virtual and augmented reality environments. The controller handle transitions between two static states: a semi-rigid, large diameter state when pneumatically pressurized and a soft, compressible, smaller diameter state when depressurized. We integrated the controller with a modified version of NVIDIA’s VR Funhouse employing the two controller states to simulate the physical feel of two virtual objects. We used finite element modeling to downselect an internal elastomer lattice within the controller that controls deformation upon inflation. Finally, we show an example of using the compliance of the handle as an interaction input by designing an algorithm to identify rapid compressions of the handle as a signal to swap objects in the virtual environment.
Publication Date
Published in
Research Area
Uploaded Files
Copyright
This material is posted here with permission of the IEEE. Internal or personal use of this material is permitted. However, permission to reprint/republish this material for advertising or promotional purposes or for creating new collective works for resale or redistribution must be obtained from the IEEE by writing to pubs-permissions@ieee.org.