A Billion Ways to Grasp: An Evaluation of Grasp Sampling Schemes on a Dense, Physics-based Grasp Data Set
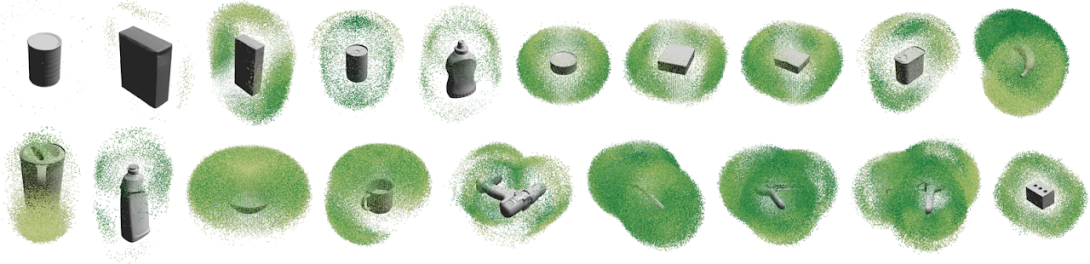
Robot grasping is often formulated as a learning problem. With the increasing speed and quality of physics simulations, generating large-scale grasping data sets that feed learning algorithms is becoming more and more popular. An often overlooked question is how to generate the grasps that make up these data sets. In this paper, we review, classify, and compare different grasp sampling strategies. Our evaluation is based on a fine-grained discretization of SE(3) and uses physics-based simulation to evaluate the quality and robustness of the corresponding parallel-jaw grasps. Specifically, we consider more than 1 billion grasps for each of the 21 objects from the YCB data set. This dense data set lets us evaluate existing sampling schemes w.r.t. their bias and efficiency. Our experiments show that some popular sampling schemes contain significant bias and do not cover all possible ways an object can be grasped.