Object Rearrangement Using Learned Implicit Collision Functions
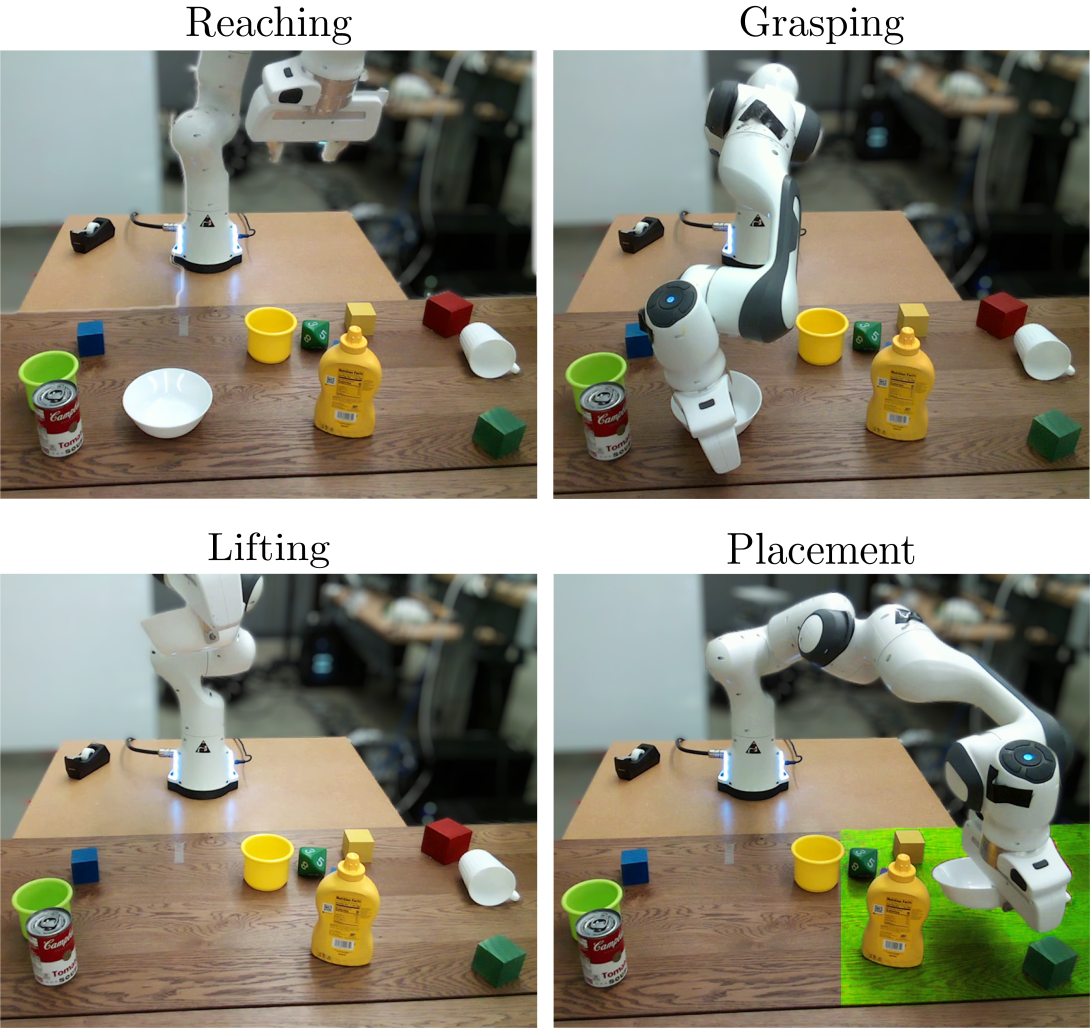
Robotic object rearrangement combines the skills of picking and placing objects. When object models are unavailable, typical collision-checking models may be unable to predict collisions in partial point clouds with occlusions, making generation of collision-free grasping or placement trajectories challenging. We propose a learned collision model that accepts scene and query object point clouds and predicts collisions for 6DOF object poses within the scene. We train the model on a synthetic set of 1 million scene/object point cloud pairs and 2~billion collision queries. We leverage the learned collision model as part of a model predictive path integral (MPPI) policy in a tabletop rearrangement task and show that the policy can plan collision-free grasps and placements for objects unseen in training in both simulated and physical cluttered scenes with a Franka Panda robot. The learned model outperforms both traditional pipelines and learned ablations by 9.8% in accuracy on a dataset of simulated collision queries and is 75x faster than the best-performing baseline.