FewSOL: A Dataset for Few-Shot Object Learning in Robotic Environments
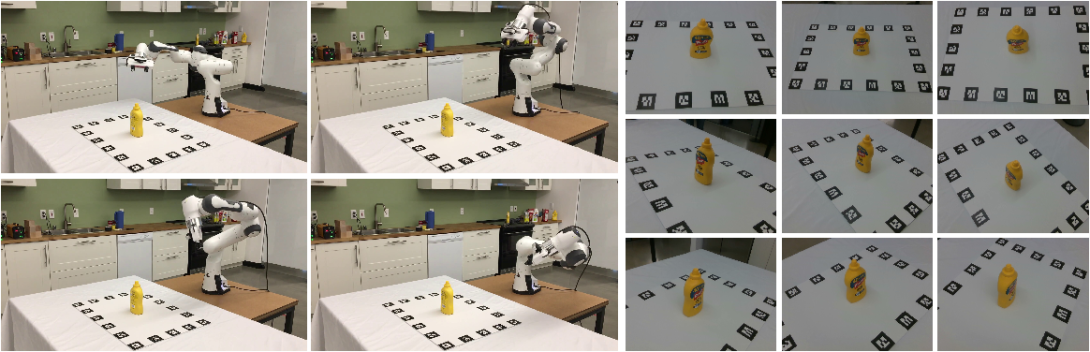
We introduce the Few-Shot Object Learning (FewSOL) dataset for object recognition with a few images per object. We captured 336 real-world objects with 9 RGBD images per object from different views. FewSOL has object segmentation masks, poses, and attributes. In addition, synthetic images generated using 330 3D object models are used to augment the dataset. We investigated (i) few-shot object classification and (ii) joint object segmentation and few-shot classification with state-of-the-art methods for few-shot learning and meta-learning using our dataset. The evaluation results show the presence of a large margin to be improved for few-shot object classification in robotic environments, and our dataset can be used to study and enhance few-shot object recognition for robot perception.
Publication Date
Research Area
External Links
Copyright
This material is posted here with permission of the IEEE. Internal or personal use of this material is permitted. However, permission to reprint/republish this material for advertising or promotional purposes or for creating new collective works for resale or redistribution must be obtained from the IEEE by writing to pubs-permissions@ieee.org.