TWIN: Two-handed Intelligent Benchmark for Bimanual Manipulation
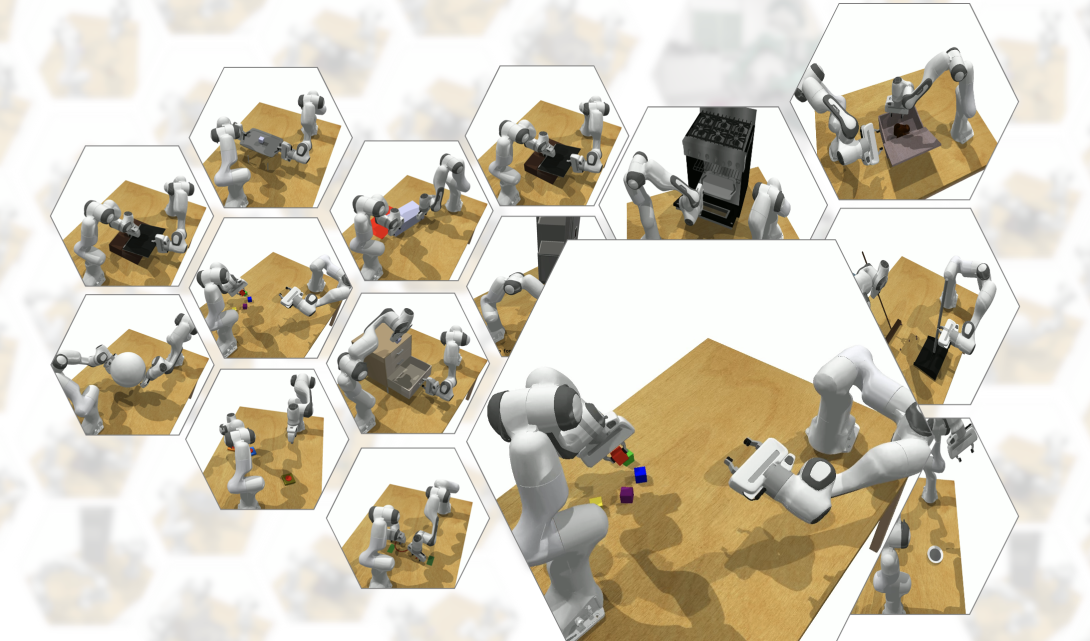
Bimanual manipulation is challenging due to precise spatial and temporal coordination required between two arms. While there exist several real-world bimanual systems, there is a lack of simulated benchmarks with a large task diversity for systematically studying bimanual capabilities across a wide range of tabletop tasks. This paper addresses the gap by presenting a benchmark for bimanual manipulation. A key functionality is the ability to autonomously generate training data without the necessity of human demonstrations to the robot. We open-source our code and benchmark, which comprises 13 new tasks with 23 unique task variations, each requiring a high degree of coordination and adaptability. To initiate the benchmark, we extended multiple state-of-the-art techniques to the domain of bimanual manipulation. The project website with code is available at: http://bimanual.github.io.
Publication Date
Research Area
External Links
Copyright
This material is posted here with permission of the IEEE. Internal or personal use of this material is permitted. However, permission to reprint/republish this material for advertising or promotional purposes or for creating new collective works for resale or redistribution must be obtained from the IEEE by writing to pubs-permissions@ieee.org.