Parallel Inversion of Neural Radiance Fields for Robust Pose Estimation
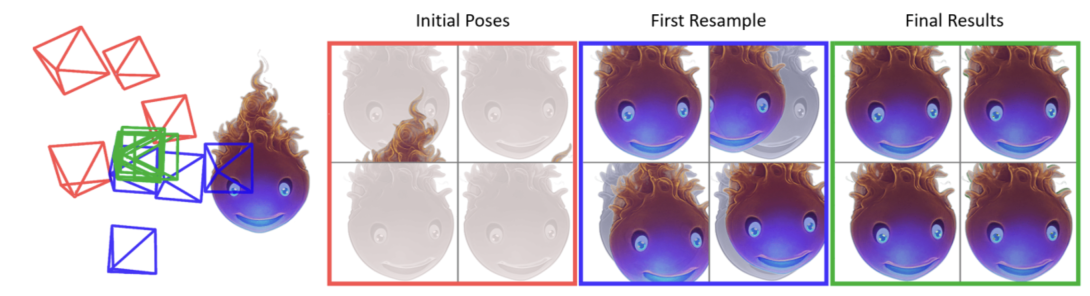
We present a parallelized optimization method based on fast Neural Radiance Fields (NeRF) for estimating 6-DoF target poses. Given a single observed RGB image of the target, we can predict the translation and rotation of the camera by minimizing the residual between pixels rendered from a fastNeRF model and pixels in the observed image. We integrate a momentum-based camera extrinsic optimization procedure intoInstant Neural Graphics Primitives, a recent exceptionally fastNeRF implementation. By introducing parallel Monte Carlo sampling into the pose estimation task, our method over comes local minima and improves efficiency in a more extensive search space. We also show the importance of adopting a more robust pixel-based loss function to reduce error. Experiments demonstrate that our method can achieve improved generalization and robustness on both synthetic and real-world benchmarks.
Publication Date
Published in
External Links
Uploaded Files
Copyright
This material is posted here with permission of the IEEE. Internal or personal use of this material is permitted. However, permission to reprint/republish this material for advertising or promotional purposes or for creating new collective works for resale or redistribution must be obtained from the IEEE by writing to pubs-permissions@ieee.org.