Occluder Simplification using Planar Sections
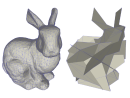
We present a method for extreme occluder simplification. We take a triangle soup as input, and produce a small set of polygons with closely matching occlusion properties. In contrast to methods that optimize the original geometry, our algorithm has very few requirements for the input—specifically, the input does not need to be a watertight, two-manifold mesh. This robustness is achieved by working on a well-behaved, discretized representation of the input instead of the original, potentially badly structured geometry. We first formulate the algorithm for individual occluders, and further introduce a hierarchy for handling large, complex scenes.
Publication Date
Published in
Research Area
External Links
Copyright
Permission to make digital or hard copies of part or all of this work for personal or classroom use is granted without fee provided that copies are not made or distributed for profit or commercial advantage and that copies bear this notice and the full citation on the first page. Copyrights for components of this work owned by others than Eurographics must be honored.