Accelerated Generative Models for 3D Point Cloud Data
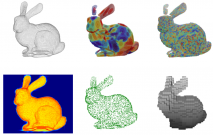
Finding meaningful, structured representations of 3D point cloud data (PCD) has become a core task for spatial perception applications. In this paper we introduce a method for constructing compact generative representations of PCD at multiple levels of detail. As opposed to deterministic structures such as voxel grids or octrees, we propose probabilistic subdivisions of the data through local mixture modeling, and show how these subdivisions can provide a maximum likelihood segmentation of the data. The final representation is hierarchical, compact, parametric, and statistically derived, facilitating run-time occupancy calculations through stochastic sampling. Unlike traditional deterministic spatial subdivision methods, our technique enables dynamic creation of voxel grids according the application’s best needs. In contrast to other generative models for PCD, we explicitly enforce sparsity among points and mixtures, a technique which we call expectation sparsification. This leads to a highly parallel hierarchical Expectation Maximization (EM) algorithm well-suited for the GPU and real-time execution. We explore the trade-offs between model fidelity and model size at various levels of detail, our tests showing favorable performance when compared to octree and NDT-based methods.
Publication Date
Research Area
External Links
Uploaded Files
Copyright
This material is posted here with permission of the IEEE. Internal or personal use of this material is permitted. However, permission to reprint/republish this material for advertising or promotional purposes or for creating new collective works for resale or redistribution must be obtained from the IEEE by writing to pubs-permissions@ieee.org.