Polarimetric Multi-view Stereo
Multi-view stereo relies on feature correspondences for
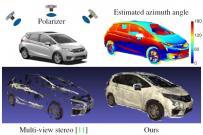
3D reconstruction, and thus is fundamentally flawed in dealing
with featureless scenes. In this paper, we propose polarimetric
multi-view stereo, which combines per-pixel photometric
information from polarization with epipolar constraints
from multiple views for 3D reconstruction. Polarization
reveals surface normal information, and is thus helpful
to propagate depth to featureless regions. Polarimetric
multi-view stereo is completely passive and can be applied
outdoors in uncontrolled illumination, since the data capture
can be done simply with either a polarizer or a polarization
camera. Unlike previous work on shape-from-polarization
which is limited to either diffuse polarization or specular
polarization only, we propose a novel polarization imaging
model that can handle real-world objects with mixed polarization.
We prove there are exactly two types of ambiguities
on estimating surface azimuth angles from polarization, and
we resolve them with graph optimization and iso-depth contour
tracing. This step significantly improves the initial depth
map estimate, which are later fused together for complete 3D
reconstruction. Extensive experimental results demonstrate
high-quality 3D reconstruction and better performance than
state-of-the-art multi-view stereo methods, especially on featureless
3D objects, such as ceramic tiles, office room with
white walls, and highly reflective cars in the outdoors.
Publication Date
Published in
Research Area
Uploaded Files
Copyright
This material is posted here with permission of the IEEE. Internal or personal use of this material is permitted. However, permission to reprint/republish this material for advertising or promotional purposes or for creating new collective works for resale or redistribution must be obtained from the IEEE by writing to pubs-permissions@ieee.org.