Multiframe Scene Flow with Piecewise Rigid Motion
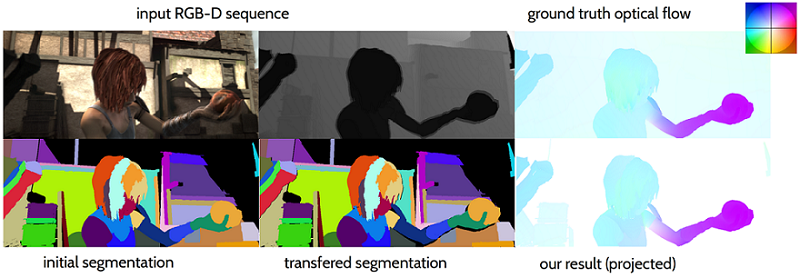
We introduce a novel multiframe scene flow approach that jointly optimizes the consistency of the patch appearances and their local rigid motions from RGB-D image sequences. In contrast to the competing methods, we take advantage of an overs-egmentation of the reference frame and robust optimization techniques. We formulate scene flow recovery as a global non-linear least squares problem whichis iteratively solved by a damped Gauss-Newton approach. As a result, we obtain a qualitatively new level of accuracy in RGB-D based scene flow estimation which can potentially run in real-time. Our method can handle challenging cases with rigid, piecewise rigid, articulated and moderate non-rigid motion, and does not rely on prior knowledge about the types of motions and deformations. Extensive experiments on synthetic and real data show that our method outperforms state-of-the-art.
Publication Date
Research Area
External Links
Uploaded Files
Copyright
This material is posted here with permission of the IEEE. Internal or personal use of this material is permitted. However, permission to reprint/republish this material for advertising or promotional purposes or for creating new collective works for resale or redistribution must be obtained from the IEEE by writing to pubs-permissions@ieee.org.