SPLATNet: Sparse Lattice Networks for Point Cloud Processing
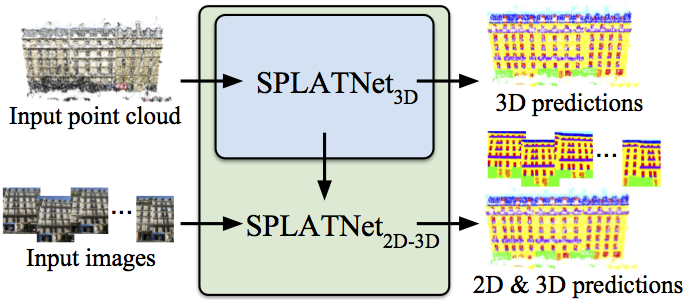
We present a network architecture for processing point clouds that directly operates on a collection of points represented as a sparse set of samples in a high-dimensional lattice. Naively applying convolutions on this lattice scales poorly, both in terms of memory and computational cost, as the size of the lattice increases. Instead, our network uses sparse bilateral convolutional layers as building blocks. These layers maintain efficiency by using indexing structures to apply convolutions only on occupied parts of the lattice, and allow flexible specifications of the lattice structure enabling hierarchical and spatially-aware feature learning, as well as joint 2D-3D reasoning. Both point-based and image-based representations can be easily incorporated in a network with such layers and the resulting model can be trained in an end-to-end manner. We present results on 3D segmentation tasks where our approach outperforms existing state-of-the-art techniques.
Publication Date
Published in
Research Area
External Links
Copyright
This material is posted here with permission of the IEEE. Internal or personal use of this material is permitted. However, permission to reprint/republish this material for advertising or promotional purposes or for creating new collective works for resale or redistribution must be obtained from the IEEE by writing to pubs-permissions@ieee.org.