Meshlet Priors for 3D Mesh Reconstruction
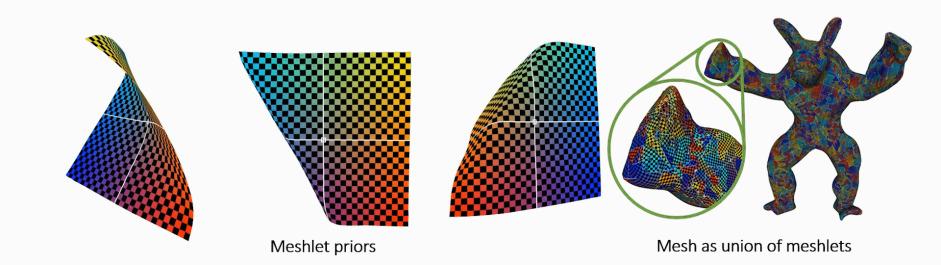
Estimating a mesh from an unordered set of sparse, noisy 3D points is a challenging problem that requires to carefully select priors. Existing hand-crafted priors, such as smoothness regularizers, impose an undesirable trade-off between attenuating noise and preserving local detail. Recent deep-learning approaches produce impressive results by learning priors directly from the data. However, the priors are learned at the object level, which makes these algorithms class-specific and even sensitive to the pose of the object. We introduce meshlets, small patches of mesh that we use to learn local shape priors. Meshlets act as a dictionary of local features and thus allow to use learned priors to reconstruct object meshes in any pose and from unseen classes, even when the noise is large and the samples sparse.
Publication Date
External Links
Copyright
This material is posted here with permission of the IEEE. Internal or personal use of this material is permitted. However, permission to reprint/republish this material for advertising or promotional purposes or for creating new collective works for resale or redistribution must be obtained from the IEEE by writing to pubs-permissions@ieee.org.