AdaptiBrush: Adaptive General and Predictable VR Ribbon Brush
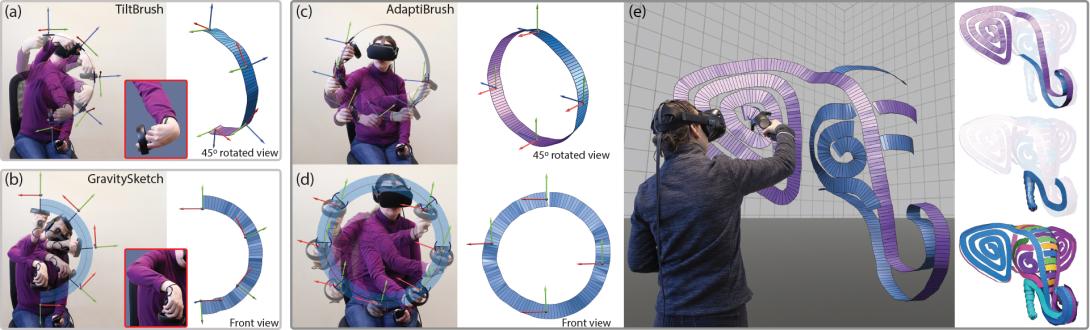
Virtual reality drawing applications let users draw 3D shapes using brushes that form ribbon shaped, or ruled-surface, strokes. Each ribbon is uniquely defined by its user-specified ruling length, path, and the ruling directions at each point along this path. Existing brushes use the trajectory of a handheld controller in 3D space as the ribbon path, and compute the ruling directions using a fixed mapping from a specific controller coordinate-frame axis. This fixed mapping forces users to rotate the controller and thus their wrists to change ribbon normal or ruling directions, and requires substantial physical effort to draw even medium complexity ribbons. Since human ability to rotate their wrists continuously is heavily restricted, the space of ribbon geometries users can comfortably draw using these brushes is limited. These brushes can be unpredictable, producing ribbons with unexpectedly varying width or flipped and wobbly normals in response to seemingly natural hand gestures. Our AdaptiBrush ribbon brush system dramatically extends the space of ribbon geometries users can comfortably draw while enabling them to accurately predict the ribbon shape that a given hand motion produces. We achieve this by introducing a novel adaptive ruling direction computation method, enabling users to easily change ribbon ruling and normal orientation using predominantly translational controller, and thus wrist, motion. We facilitate ease-of-use by computing predictable ruling directions that smoothly change in both world and controller coordinate systems, and facilitate ease-of-learning by prioritizing ruling directions which are well-aligned with one of the controller coordinate system axes. Our comparative user studies confirm that our more general and predictable ruling computation leads to significant improvements in brush usability and effectiveness compared to all prior brushes; in a head to head comparison users preferred AdaptiBrush over the next-best brush by a margin of 2 to 1.
Publication Date
Published in
External Links
Copyright
Copyright by the Association for Computing Machinery, Inc. Permission to make digital or hard copies of part or all of this work for personal or classroom use is granted without fee provided that copies are not made or distributed for profit or commercial advantage and that copies bear this notice and the full citation on the first page. Copyrights for components of this work owned by others than ACM must be honored. Abstracting with credit is permitted. To copy otherwise, to republish, to post on servers, or to redistribute to lists, requires prior specific permission and/or a fee. Request permissions from Publications Dept, ACM Inc., fax +1 (212) 869-0481, or permissions@acm.org. The definitive version of this paper can be found at ACM's Digital Library http://www.acm.org/dl/.