Planning with Occluded Traffic Agents using Bi-Level Variational Occlusion Models
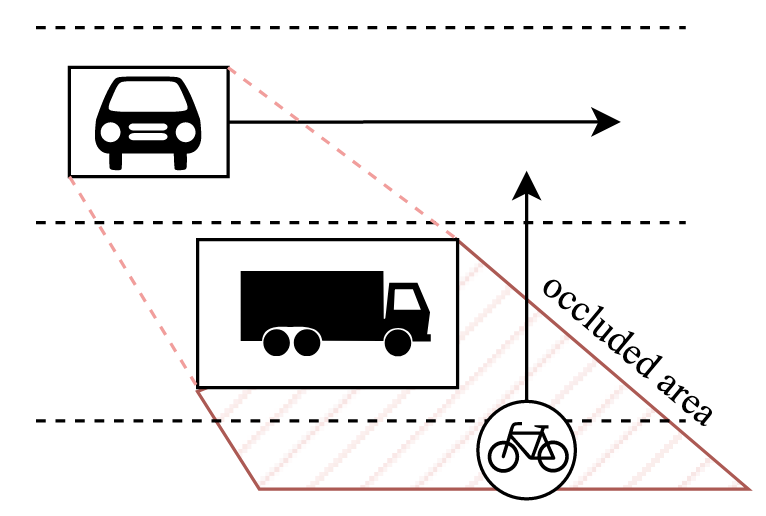
Reasoning with occluded traffic agents is a significant open challenge for planning for autonomous vehicles. Recent deep learning models have shown impressive results for predicting occluded agents based on the behaviour of nearby visible agents; however, as we show in experiments, these models are difficult to integrate into downstream planning. To this end, we propose Bi-level Variational Occlusion Models (BiVO), a two-step generative model that first predicts likely locations of occluded agents, and then generates likely trajectories for the occluded agents. In contrast to existing methods, BiVO outputs a trajectory distribution which can then be sampled from and integrated into standard downstream planning. We evaluate the method in closed-loop replay simulation using the real-world nuScenes dataset. Our results suggest that BiVO can successfully learn to predict occluded agent trajectories, and these predictions lead to better subsequent motion plans in critical scenarios.
Publication Date
Research Area
External Links
Copyright
This material is posted here with permission of the IEEE. Internal or personal use of this material is permitted. However, permission to reprint/republish this material for advertising or promotional purposes or for creating new collective works for resale or redistribution must be obtained from the IEEE by writing to pubs-permissions@ieee.org.