Recursive Control Variates for Inverse Rendering
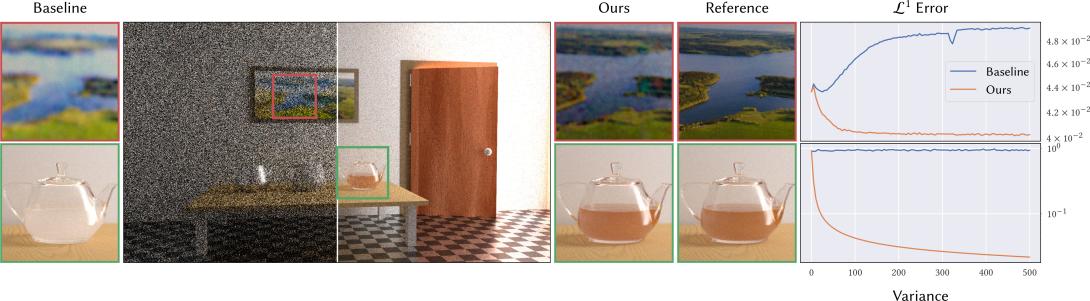
We present a method for reducing errors---variance and bias---in physically based differentiable rendering (PBDR). Typical applications of PBDR repeatedly render a scene as part of an optimization loop involving gradient descent. The actual change introduced by each gradient descent step is often relatively small, causing a significant degree of redundancy in this computation. We exploit this redundancy by formulating a gradient estimator that employs a \emph{recursive control variate}, which leverages information from previous optimization steps. The control variate reduces variance in gradients, and, perhaps more importantly, alleviates issues that arise from differentiating %non-$\L^2$ loss functions with respect to noisy inputs, a common cause of drift to bad local minima or divergent optimizations. We experimentally evaluate our approach on a variety of path-traced scenes containing surfaces and volumes and observe that primal rendering efficiency improves by a factor of up to 10.
Publication Date
Published in
External Links
Uploaded Files
Copyright
Copyright by the Association for Computing Machinery, Inc. Permission to make digital or hard copies of part or all of this work for personal or classroom use is granted without fee provided that copies are not made or distributed for profit or commercial advantage and that copies bear this notice and the full citation on the first page. Copyrights for components of this work owned by others than ACM must be honored. Abstracting with credit is permitted. To copy otherwise, to republish, to post on servers, or to redistribute to lists, requires prior specific permission and/or a fee. Request permissions from Publications Dept, ACM Inc., fax +1 (212) 869-0481, or permissions@acm.org. The definitive version of this paper can be found at ACM's Digital Library http://www.acm.org/dl/.