HANDAL: A Dataset of Real-World Manipulable Object Categories with Pose Annotations, Affordances, and Reconstructions
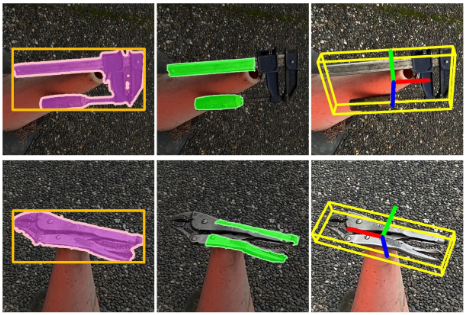
We present the HANDAL dataset for category-level object pose estimation and affordance prediction. Unlike previous datasets, ours is focused on robotics-ready manipulable objects that are of the proper size and shape for functional grasping by robot manipulators, such as pliers, utensils, and screwdrivers. Our annotation process is streamlined, requiring only a single off-the-shelf camera and semi-automated processing, allowing us to produce high-quality 3D annotations without crowd-sourcing. The dataset consists of 306K annotated image frames from 2.2K videos of 210 real-world objects in 17 categories. We focus on hardware and kitchen tool objects to facilitate research in practical scenarios in which a robot manipulator needs to interact with the environment beyond simple pushing or indiscriminate grasping. We outline the usefulness of our dataset for 6-DoF category-level pose+scale estimation and related tasks. We also provide 3D reconstructed meshes of all objects, and we outline some of the bottlenecks to be addressed for democratizing the collection of datasets like this one.