Motion Representation#
Kimodo uses a motion representation that combines a smoothed root representation with global joint positions, rotations, and various auxiliary features. For full details, please refer to the tech report.
The representation is implemented in kimodo/motion_rep/reps/kimodo_motionrep.py and allows easily going to and from this feature representation.
Coordinate System#
All motion features use a right-handed coordinate system with:
Y up
+Z forward
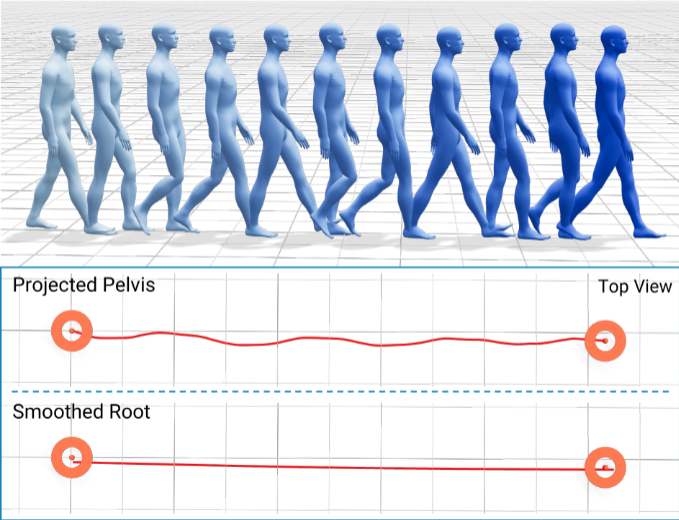
Smoothed Root Representation#
We use a smoothed root trajectory for the global root position to make path-following constraints more natural and controllable. Smoothing removes high-frequency pelvis jitter while preserving overall motion direction, so 2D waypoints or paths drawn by users remain clean and easy to match during generation, while the pelvis can still move naturally around the smoothed curve.
Pose Feature#
At each frame, the pose feature vector is the concatenation of:
Smooth root position (
smooth_root_pos, 3): Smoothed pelvis/root position. The x/z components track ground-plane motion and y stores height.Global root heading (
global_root_heading, 2):[cos(theta), sin(theta)]heading direction of the root.Local joint positions (
local_joints_positions,J x 3): Joint positions in a pelvis-relative space with the smoothed root x/z offset applied.Global joint rotations (
global_rot_data,J x 6): 6D rotation representation of each joint’s global orientation.Joint velocities (
velocities,J x 3): Global joint velocities.Foot contacts (
foot_contacts, 4): Binary contact indicators for the left/right foot contact points.