Robust Trajectory Prediction against Adversarial Attacks
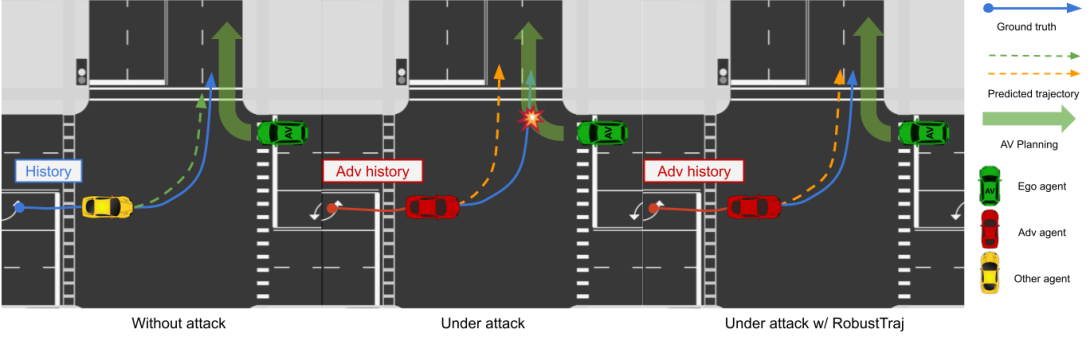
Trajectory prediction using deep neural networks (DNNs) is an essential component of autonomous driving (AD) systems. However, these methods are vulnerable to adversarial attacks, leading to serious consequences such as collisions. In this work, we identify two key ingredients to defend trajectory prediction models against adversarial attacks including (1) designing effective adversarial training methods and (2) adding domain-specific data augmentation to mitigate the performance degradation on clean data. We demonstrate that our method is able to improve the performance by 46% on adversarial data and at the cost of only 3% performance degradation on clean data, compared to the model trained with clean data. Additionally, compared to existing robust methods, our method can improve performance by 21% on adversarial examples and 9% on clean data. Our robust model is evaluated with a planner to study its downstream impacts. We demonstrate that our model can significantly reduce the severe accident rates (e.g., collisions and off-road driving).