Alpamayo 1: Bridging Reasoning and Action Prediction for Generalizable Autonomous Driving in the Long Tail
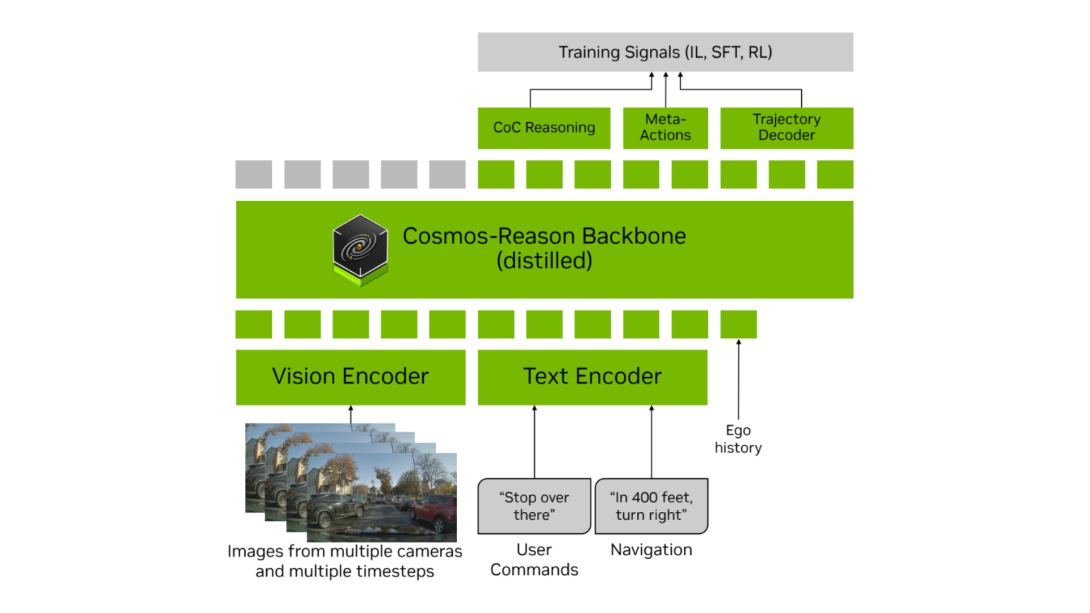
We introduce Alpamayo 1, a vision–language–action model (VLA) that integrates Chain of Causation reasoning with trajectory planning to enhance decision-making in complex driving scenarios.
Comprehensive evaluations with open-loop metrics, closed-loop simulation, and real-world vehicle tests demonstrate that Alpamayo 1 is state-of-the-art in multiple aspects (including reasoning, trajectory generation, alignment, safety, latency, and more).
By bridging interpretable reasoning with precise control, Alpamayo 1 demonstrates a practical path toward Level 4 autonomous driving.
Dataset available here.
Publication Date
External Links
Uploaded Files
Alpamayo 1.pdf8.21 MB